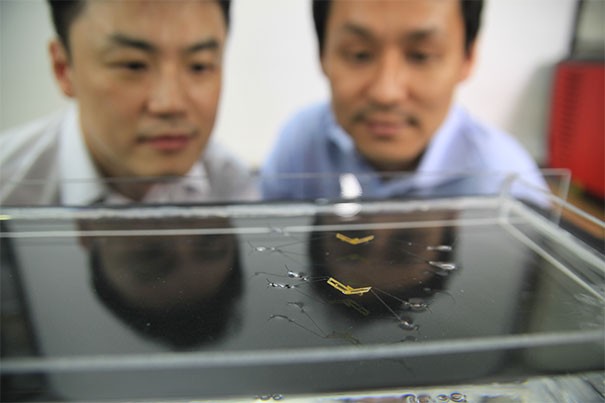
Seoul National University (SNU) professors Ho-Young Kim (from left) and Kyu-Jin Cho watch the semi-aquatic jumping robotic insects developed by a team from SNU and Harvard. (Photo : Seoul National University/Harvard )
Scientists have now developed a tiny, wiry robot that can jump and walk on water based on the the water strider insect. This robotic version however uses the same energy similar to the water strider but it does so in a most elegant manner, without breaking the water surface.
The robot launches using a downward force that can never exceed the surface tension that the water possesses where this force can produce a sticky or glue effect, holding surface water molecules together.
Scientists from South Korea and the US from Harvard's Wyss Institute for Biologically Inspired Engineering and School of Engineering and Applied Sciences collaborated on this new study where lead researchers Ho-Young Kim and Kyu-Jin Cho from Seoul National University utilized water strider insects found in their local pond.
The scientists believe that the insects' semi-aquatic motility or the ability to produce energy or force in a spontaneous, active manner, can be further explored and studied via recording how the insects jump on water under laboratory conditions with high speed cameras.
Scientists reveal through imaging experiments that the technique used by the insects to seemingly float and walk on water via jumping occurs when the insects rise upwards while they push the water surface downward and at the same time, closing all its four legs inward.
With this new knowledge, the team set out to design their robot. The insect robot body measures two centimeters where the body is made out of layers of ultra thin material that are folded into a V-shape that also has a spring across the entire body.
During a jump, the spring releases energy in a slow manner where it drags the tips and ends of the robot's body along with its five centimeter insect-thin legs downward where it can gradually increase force within the limits of the water surface tension.
The robot legs are also rotated inwards similar to the real insects in order to maximize the interaction time of the legs and the water.
Researchers believe that this insect robot can provide environmental applications to monitor pollution in waterways. However their goal was not to commercially sell the mini robot but to explore new ways to explore the robot's aquatic mobility.
This new study is published in the journal, Science.