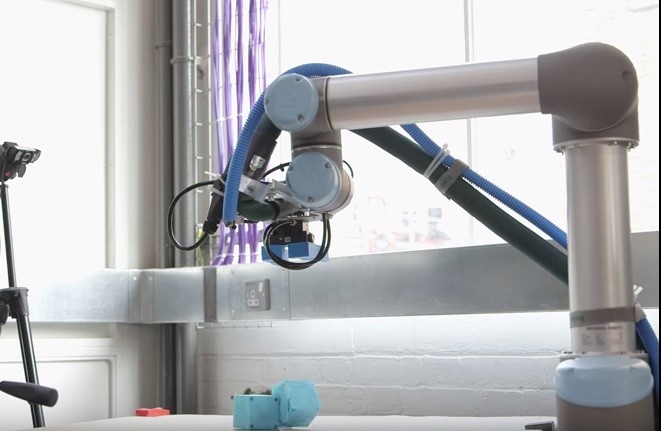
A mother robot can build children robots and keeps the best designs and disassembles the rest. (Photo : University of Cambridge/Youtube)
This new robot may sound like an apocalyptic sci-fi movie but scientists have already developed this certain artificial evolution that involves a robot that could create generations of its "baby" robots then examines and evaluates them each and selects the best ones, that is eerily similar to the way Mother Nature woks with natural selection and evolution.
Researchers from the Univesity of Cambrige that was led by Fumiya Iida created a "moher robot" where this machine has the ability to assemble smaller robots and gluing them with other pieces where some are equipped with motors in numerous configurations.
After assembling and building these tiny robots, the mother robot observes quickly how these "children" robots can move and keeps the best designs where the faulty ones are disassembled. The mother robot uses this information to create a "new" generation by either with successful design mutations or integration with faulty ones.
According to Iida, natural selection basically consists of reproduction and then assessment and then reporduction and then assessment and so on, into a cycle. This is essentially what the mother robot is trying to accomplish, where it presents an evolution of the improvement and diversification of its offspring.
Iida says that this artifical evolution is successful too, where after a few robot generations, the children were now running twice as fast as opposed to the last batch.
Prior research have already proven that artificial evolution already works, where artificial intelligence evaluate thousands to million of sequences and possibilities via digital simulation. However, demonstrating this in real life with real robotics is solid evidence that this actually works which this team has proven.
Researchers are hoping to develop this mother robot in the future with a combination of simulation and real life tests that can increase the capacities and complexities of the child robots or even use techniques inspired by nature to improve their overall efficiency.
This new study is published in the journal PLOS One.