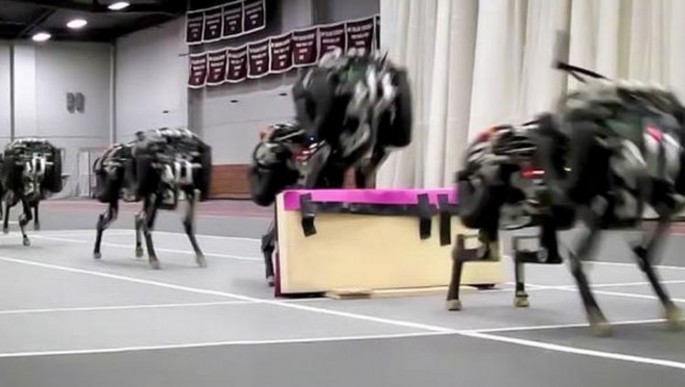
MIT's robot cheetah jumps (Photo : MIT/Haewon Park, Patrick Wensing, Sangbae Kim)
A robot cheetah that could only run last year can now jump over obstacles as high as 18 inches, a most remarkable advance in the development of autonomous intelligent robots.
A new set of "fast algorithms" developed by scientists from the Massachusetts Institute of Technology or MIT allows their four-legged cheetah to "see" and jump over hurdles as it runs untethered. MIT said their robot cheetah is the first four-legged robot to run and jump over obstacles autonomously.
The research that led to this remarkable breakthrough was funded by the U.S. Defense Advanced Research Projects Agency or DARPA.
The military applications of a smart four-legged robot are considerable. U.S. ground troops, for example, will be supported in their military operations by future versions of the robot that will carry ammunition, supplies and gear over rough terrain.
To get a running jump, the robot plans its path much like a human runner. When it detects an approaching obstacle, it estimates that object's height and distance.
The robot determines the best position from which to jump. It then adjusts its stride to land just short of the obstacle before exerting enough force to push up and over the obstacle.
Based on the obstacle's height, the robot then applies a certain amount of force to land safely before resuming its initial pace.
A video showing the tethered and untethered robot cheetah jumping can be viewed here.
In these experiments on a treadmill and an indoor track, the cheetah robot successfully cleared obstacles up to 18 inches tall -- more than half of the robot's own height -- while maintaining an average running speed of five miles per hour.
"A running jump is a truly dynamic behavior," says Sangbae Kim, an assistant professor of mechanical engineering at MIT.
"You have to manage balance and energy, and be able to handle impact after landing. Our robot is specifically designed for those highly dynamic behaviors."
In September 2014, the MIT researchers demonstrated the robotic cheetah was able to run untethered, a feat that Kim said the robot performed "blind," without the use of cameras or other vision systems.
Now, the robot can "see," with the use of onboard LIDAR, or a visual system that uses reflections from a laser to map terrain. The team developed a three-part algorithm to plan the robot's path based on LIDAR data. Both the vision and path-planning system are onboard the robot, giving it complete autonomous control.
The algorithm's first component enables the robot to detect an obstacle and estimate its size and distance. Researchers devised a formula to simplify a visual scene in which the ground is represented as a straight line, and any obstacles as deviations from that line. Using this formula, the robot can estimate an obstacle's height and distance from itself.
Kim and his colleagues -- including research scientist Hae won Park and postdoc Patrick Wensing -- will demonstrate their cheetah's running jump at the DARPA Robotics Challenge or DRC in June. They will also present a paper detailing the autonomous system in July at the conference Robotics: Science and Systems.
Twenty-five human-robot teams from seven countries will compete for $3.5 million in prizes June 5-6 during the robotics challenge finals in California.
DRC is a program for robot systems and software teams seeking to develop robots that can help people respond to natural and other disasters.
DARPA said participating teams from Germany, Hong Kong, Italy, Japan, China, South Korea and the United States represent some of the most advanced robotics research and development organizations in the world.