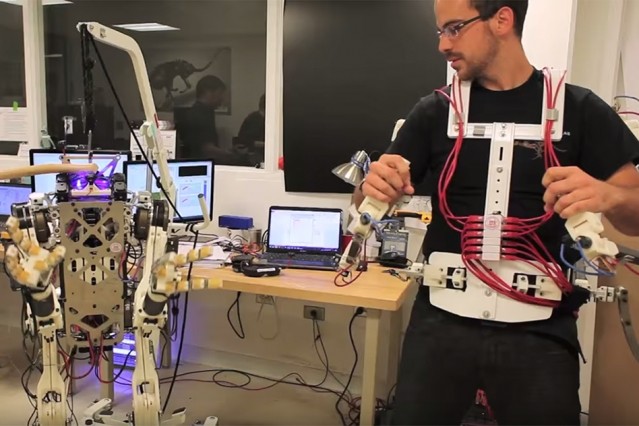
PhD student Joao Ramos demonstrates the Balance Feedback Interface, a system that enables an operator to control the balance and movements of a robot, through an exoskeleton and motorized platform. (Photo : Melanie Gonick/MIT)
Robots are often seen as clumsy since they do not possess reflexes that correct their mistakes before accidents occur. Humans can stand right up again after stumbling but a robot will just land on their face and not correct this movement.
Now, researchers from the MIT Department of Mechanical Engineering are now developing robots that will correct this lack of balance. This new platform is recognized as Hermes, which is a humanoid robot especially designed for disaster response or emergency situations that is controlled by a human pilot in an exosuit.
Developed by Sangbae Kim and team from the Biomimetics Robotics Lab, this human pilot can control the robot upon moving his arms and legs where Hermes will also mimic this movement. When Hermes stumbles during an obstacle, the human controller can react and correct this by controlling the robot to stand on its two feet.
According to Albert Wang, keeping and maintaining balance is crucial for humanoid robots or legged robots to carry out a task successfully. This problem is now addressed by team directly with a human pilot that will feed the balance sensation to the robot by using natural reflexes and learning capabilities to keep the robot balanced.
This will also mean that if the robot is losing balance, the exosuit is designed to directly feel that falling sensation to the direction the robot is falling so that the human pilot can react and push back and shift their feet in response to the fall, in the most natural manner.
Apart from this shared balance sensation and limb and physical movement from the robot to the human, there is also a camera located in the robot's head for real time visual cues about the robot's environment for the human pilot to control and manipulate objects with a headset and set of joysticks.
Wang adds that in the future, the team would like to merge some level of autonomous control with the human's intelligence for Hermes.